Some time ago I bought a lot of Weller soldering irons at an auction for cheap. For the de-soldering iron I already made a station. In this lot were also a WMRT soldering tweezers cable. Next to that I bought a WMRP iron at a ham flea market. Only problem was that I do not have a station for these. I could buy one, but they are rather expensive.


After some searching for options I came across this site: http://kair.us/projects/weller/index.html I immediately ordered myself a set of boards to make a DIY one.

However I then came to the conclusion that I did not really like having 2 extra boxes on my desk for the stations. I want something that is small and hides somewhere. Maybe underneath the soldering iron stand. So I designed my own board and enclosure to 3d print. A few weeks later the boards came in.

The display and rotary encoder are now on a separate board that mounts at a right angle to the main board. On the back end of the board panel is also a board to mount in the WMRT holder because I suspected it was broken. (Later on I found out it was still ok.)
3D Design:


For both the WMRT and WMRP this part was exactly the same.
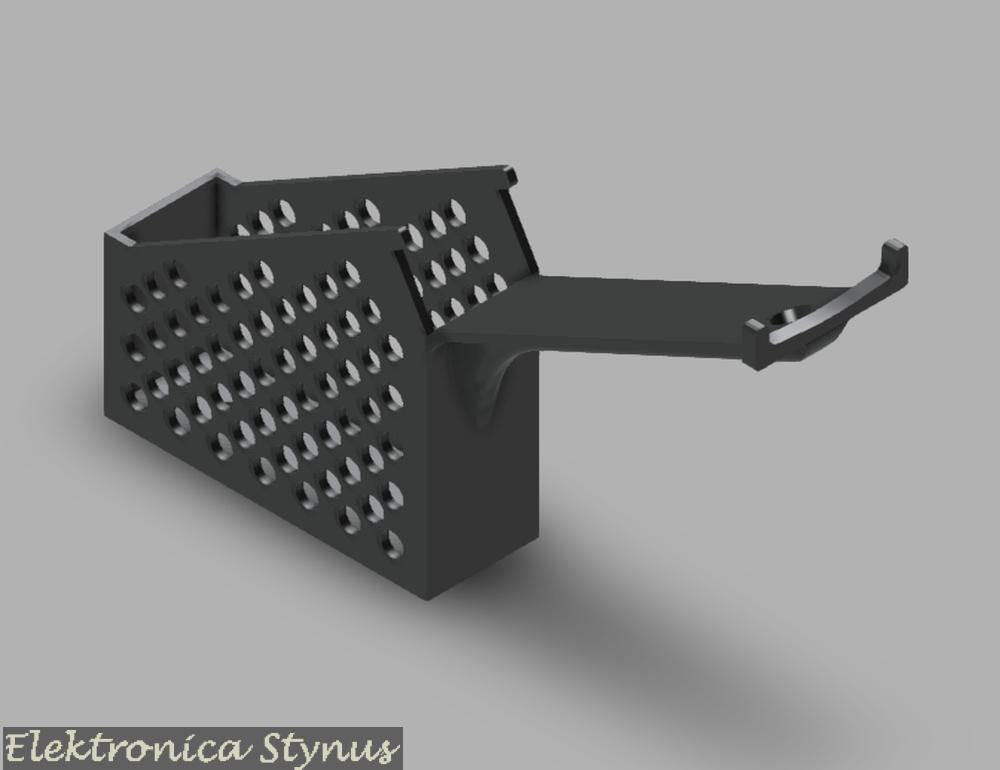
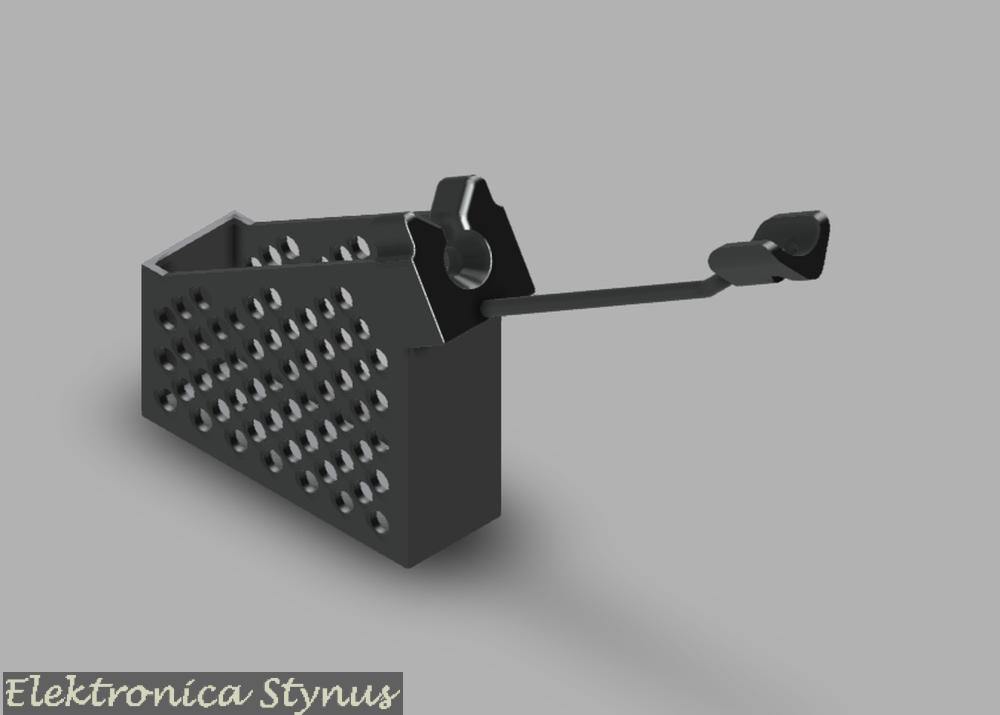
Next part was a holder for the iron. I could either build something out of metal or 3d print it. I chose for the second. The base was printed out of normal PLA since it does not really get hot unless a piece of molten solder falls on it. For the holder it is a different story. I needed a material that can handle high temperatures. This was not easy to find, but I found out that objects made in the resin printer can handle the heat quite well if you do not force the tips into it. Therefore I chose to print these out of resin.
For the WMRT the complete thing is resin with a magnet pushed in. For the WMRP the main part is resin, but the long thin support I made from 6mm² copper wire.


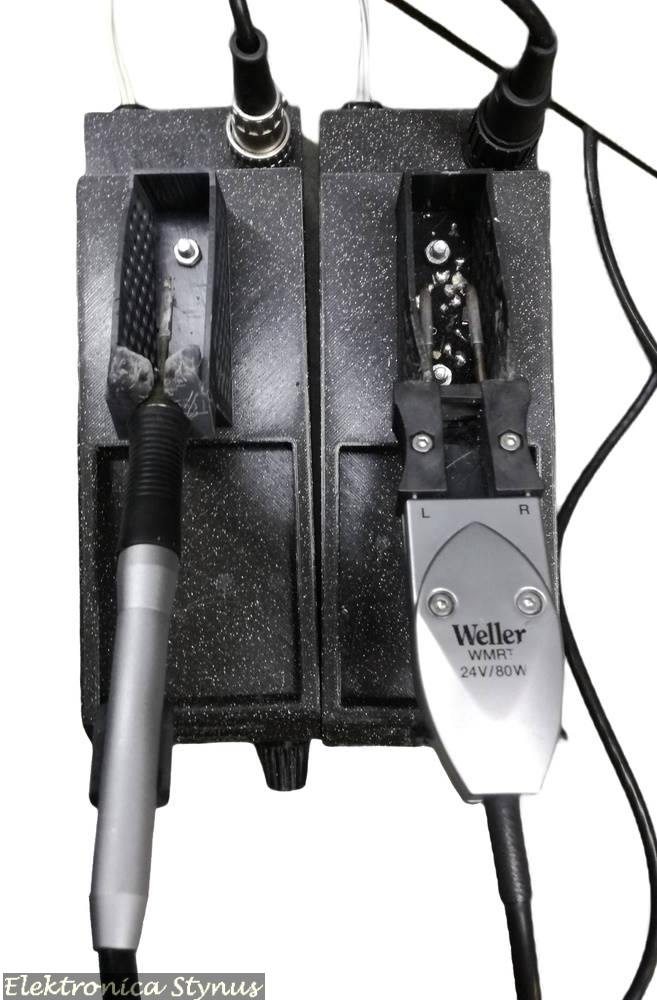
On the bottom of the iron bases I glued some washers. In the station part are some magnets, this makes that the base does not move easy on the station part, but can be detached when needed.
Next I needed a way to connect them to the 12V desk PSU. I also wanted a way to switch them on / off. So another box with switches needed to be build.



Ok, so now the WMRT works, but the WMRP I found out was not a WMRP but a WXMP. This means that the reed switch is replaced by a hall sensor and a lot of electronics are added. I removed this board and replaced it by a piece of experiment board with a reed switch from a door contact and the KTY 82 temperature compensation.


Now my desk looked like this:

As you can see the front of the stations is still open, so this was the next project. For this I used some black mirror transparent plexi. The button was 3D printed.
Off:

On:

Files / Links:
- Firmware: http://kair.us/projects/weller/index.html
- Solder stand STL files: https://www.printables.com/model/448775-wmrp-wmrt-solder-iron-holder
- Station STL files: https://www.printables.com/model/448782-wmrt-wmrp-controller-enclosure
- Station board: https://www.pcbway.com/project/shareproject/WMRP_and_WMRT_compatible_soldering_station_b1573b9b.html
- Switch box STL files: https://www.printables.com/model/448829-switch-box-for-12v-soldering-irons



































































