In school we got the assignment to make a robot car for a project week. Therefore I decided to use this car for that project. The project week is after the Easter vacation. The hardware must be finished then, the software will be written in that week.
Today I made a IR approximation sensor. The sensors I wanted to use before turned out to be a bit disappointing after some tests. I could not get the range to extend 5mm. For the new version I have used some louse IR leds and TSOP1738 ir receivers. I have a test version on breadboard.
Circuit: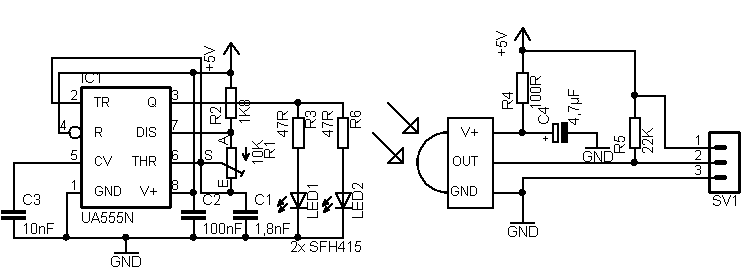
Video:
The green led on the bottom is the output.
I don’t know for sure witch pic I’m going to use, but I think it’s going to be a 16F627. To control the motors I’m going to use a L293 H-bridge IC.